別人的國慶節,硬生生造了一只鋼鐵俠的機械臂!
依舊是來自華為天才少年稚暉君,還是他迄今為止搞的項目中,最復雜的那種。
來吧,展示——給葡萄縫針:
在“葡萄包扎術”后,原本裂開小口的它,變成了這個樣子:
劃個重點:
上面的所有過程,可以在廁所遠程、實時完成!
它的名字也非常有趣——叫做Dummy。
但畢竟頭頂著“B站野生鋼鐵俠”光環的稚暉君,都說這是自己最復雜的項目(耗時4個月),硬核程度定然不僅于此。
真實情況是——這臺機械臂,里里外外全部出自稚暉君之手!
(友友們,又是被稚暉君破防的一天)
于是乎,很自然的,彈幕再次被網友刷瘋,來感受一下這個feel(滿屏的“國粹”):
(注:本文內容已經過稚暉君授權)
稚暉君想要打造的機械臂,是具備多種交互方式的。
例如把剛才機械臂的末端,換成“力反饋夾爪”,就秒變成了可以夾薯片的機械臂:
除了“力反饋夾爪”,若是換成不同效應器,那可以實現的結果也會不同:
安裝“激光器”,就可以實現三維雕刻
安裝“畫筆”,就可以進行書畫
安裝小型的“主軸”,可以作為6軸的雕刻機
而上面展示的這一切,均是——同步現實!
除此之外,稚暉君還做了許多不同的交互方式。
例如結合比較前沿的技術,增強現實 (AR)——真正的“指哪打哪”了。
還有通過示教器來開啟的方式。
而這個示教器也是出自稚暉君之手,用他的話來說就是:
有我的地方就有屏幕。
這便是稚暉君設計的無線智能小終端,也是這臺機械臂的“伴侶”了。
它可以通過低功耗藍牙和機械臂進行無感連接,而在連接之后,就可以實時顯示機械臂的各種狀態信息、切換各種功能了。
當然,稚暉君也做了較為“陽間”的圖形化方式。
而較為極客的2兩種方法:通過串口和命令行,也有的哈。
這樣的野生鋼鐵俠機械臂,究竟是怎么“煉成”的?
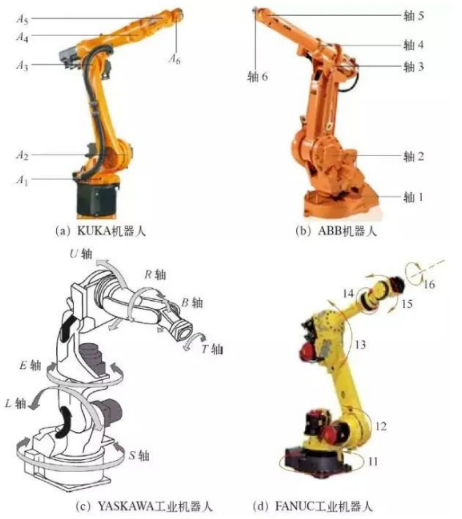
這臺看起來很酷炫的“手子”,屬于小型高精度6軸機械臂。
整體來說,機械臂的打造主要分為四大部分:機械臂設計、閉環伺服、控制器和空間定位裝置,分別對應機器人的軀干、心臟、小腦和眼睛。
機械臂設計,指機械臂的“軀干”,讓機械臂能穩定運動的必要步驟,包括機械分析、外觀設計(3D建模)、選材等。
當然,這里的設計并不那么容易。光是版本稿,就多達150多版:
為了確保穩定+便宜美觀,最后的機械臂主體采用了鋁CNC(數控)加工(確保穩定),裝飾再采用3D打印進行制作(節省成本)。
其中,CNC部分是稚暉君拜托“家里有廠”的UP主@XIKII拆機狂魔你西哥 幫忙制作的,全部的8個金屬件一共耗時半個月:
最后的外觀設計出來,是醬嬸的(中國紅&鋼鐵俠紅),別說還挺好看:
閉環伺服,也就是機械臂的“心臟”,用來提供讓機械臂干活的動力。
具體來說,軟件上包括FOC算法、絕對值編碼器&PID算法,CAN總線通信協議等部分,硬件上,除了電機等材料的選用,還包括散熱等細節。
通常來說,機械臂會采用無刷伺服電機,但這里它的體積確實比較大。
由于稚暉君想做比較小巧的機械臂,所以最后采用了步進電機,搭配0背隙諧波減速器,單個驅動效果做出來是這個樣子的:
既然是6軸,最后整體采用了6個步進電機+6個諧波減速器,搭配軟件設計構成了機械臂的“心臟”。
控制器,指機械臂的“小腦”,用來操控機械臂的動作、來實現各種功能。
除了原理上需要掌握運動學、動力學分析以外,在軟硬件上還需要掌握電路設計、通信和電源管理等額外的“斜杠”技能。
事實上,光是微控制單元(MCU),這臺機械臂上就多達12個。
其中,主控制器(采用冗余設計)和電機伺服驅動器(支持CAN總線&功率機聯)的設計如下:
至于電路設計,也比想象中要更加復雜,畢竟要想達到上述“多控制”功能的話,除了命令行控制以外,藍牙、無線通信的相關軟硬件也需要進行考慮。
沒錯,除了有線控制以外,藍牙、WiFi、2.4G同樣能控制這臺機械臂~
最后就是空間定位裝置了,也就是機械臂的“眼睛”,用來讓機械臂“看見”、并操作需要完成的任務。
這里面包括我們常見的雙目視覺算法、AHRS系統和力傳感系統等,都在這一步完成。
沒錯,稚暉君設計的機械臂并非只能做“輸入任務并完成”的簡單操作,而是一臺真正能夠從多個角度接收任務、并實時處理的“智能機械手”。
簡單來說,就是用雙目視覺算法識別,再用AI算法實現姿態估計之類的操作:
搭載到機械臂上后,“手子”就能根據人的動作,完成一系列復雜的操作(控制器改自PS5手柄):
當然,經過軟件去抖、運動范圍重映射、力矩強增強等操作后,機械臂能完成比手精度更高的操作(手抖玩家福音)。
最后,就是將這幾部分的軟件算法和硬件組裝起來,進行調試:
最后的成品效果是這樣的,非常靈動:
那么,這臺機械臂究竟能達到一個什么水平呢?
眾所周知,機械臂的價格會隨著精度的提升蹭蹭上漲。
一臺質量比較好的、精度為0.6mm的工業6軸機械臂,價格會達到幾萬元左右,而精度在0.02mm左右的四大家族的工業機械臂,價格單位則直接漲到了幾萬美元。
從稚暉君測試結果來看,精度為0.01mm的百分表,進行末端重復精度測量,精度直接達到了0.02mm左右:
這樣的精度,按理說機器人的價格也不菲。
然而,據稚暉君表示,Dummy的整體硬件成本,計算下來不到1萬元!
當然,稚暉君也適當地節省了成本,包括諧波減速器和機械臂本體,就都是二手的(如果是全新的硬件,成本可能需要2萬元左右)。
除此之外,據稚暉君表示,這臺機械臂本身體積也很小,所以運動范圍和精度也相應變小和變高了(目前市面上應該是沒有體積這么小、精度這么高的機械臂)。
這樣的機械臂,究竟可以用在哪里呢?
大膽想象一下,未來如果繼續提升精度,遠程手術也未嘗不可:
還有網友更具體地設想了一下使用場景:
即使在偏遠的地方,各地大醫院的醫生也能通過遠程手術,同步實現救人;或是利用智能程序設定,實現簡單的縫皮等操作,為醫生節省更多時間。
當然,我們也知道,稚暉君已經于去年年底加入了“華為天才少年”。
而這次稚暉君的項目,操作系統和AI計算平臺也分別都用上了華為鴻蒙和昇騰Atlas處理器。
就在8月2日,任正非還在題為「江山代有才人出」的演講中表揚了稚暉君的項目,指出這是華為創新的動力:
但對于2012實驗室,公司從未給過你們過多約束。比如,有人研究自行車的自動駕駛,公司沒有約束過他。
我們要生產自行車嗎?沒有啊。這是他掌握的一把“手術刀”,或許以后會發揮什么作用,產生什么巨大的商業價值。
文章來源:量子位
聲明:本文所使用視頻、圖片、文字如涉及作品版權問題 ,請第一時間告知,我們將根據您提供的證明材料確認版權并立即刪除文章!
 當前位置:
當前位置: 熱門課程
熱門課程