坐標系是在機器人或其他空間設置的位置指標系統,以確定機器人的位置和姿勢。
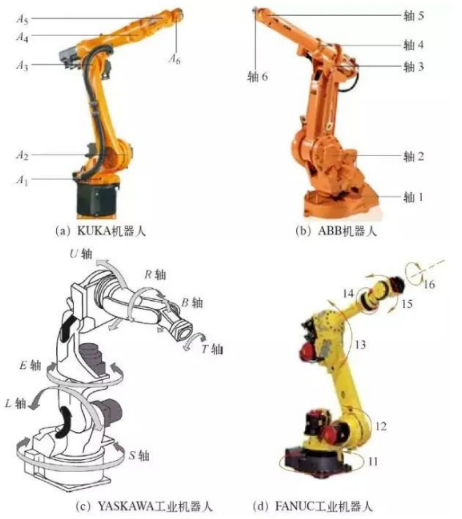
工業機器人上的坐標系有六種:大地坐標系(WorldCordinatesystem)、基坐標系(Basecordinatesystem)、關節坐標系(Jointcordinatesystem)、工具坐標系(Torkordinatesystem)、工件坐標系(Workobjectcordinatestem)和用戶坐標系。
1.地球坐標系。
地球(世界)坐標系是固定在空間上的標準直角坐標系,固定在事先確定的位置。基于坐標系設置用戶坐標系。
2.基坐標系。
基坐標系由機器人底座基點和坐標位置組成,是機器人其他坐標系的基礎。
3.關節坐標系。
關節坐標系是設置在機器人關節中的坐標系,是每個軸相對于其原點位置的絕對角度。
4.工具坐標系。
工具坐標系用于確定工具的位置,由工具中心點(TCP)和坐標位置組成。必須提前設置工具坐標系。默認工具坐標系將在沒有定義的情況下取代坐標系。
工具坐標系可以通過N(N>=4)點法確定:機器人TCP可以通過N種不同的姿勢與指定點接觸獲得多組解,通過計算獲得當前TCP與工具安裝法蘭中心點(tol0)的相應位置,坐標系方向與tool0一致。
5.工件坐標系。
工件坐標系用于確定工件的位置,由工件原點和坐標位置組成。工件坐標系可采用三種方法確定:點X1與點X2連接形成X軸,點Y1向X軸的垂直線為Y軸,Z軸方向由右手定則確定。
6.用戶坐標系。
用戶坐標系是用戶定制每個工作空間的直角坐標系,用于位置寄存器的教學和執行、位置補償指令的執行等。大地坐標系將在沒有定義的情況下取代坐標系。
 當前位置:
當前位置: 熱門課程
熱門課程